
 首页 >>
首页 >> 工业机器人
2025-06-07
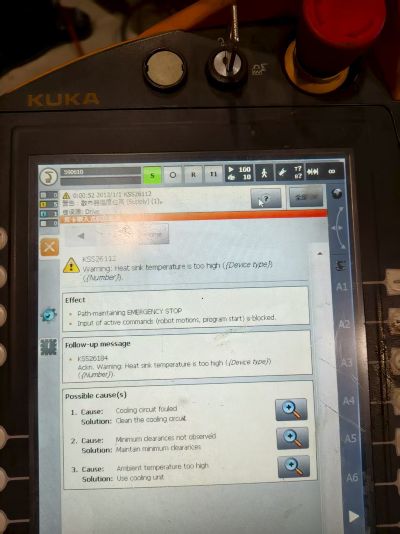
库卡机器人报警KSS26112散热器温度过高
一、硬件检查1、伺服单元状态检测...
2025-05-20
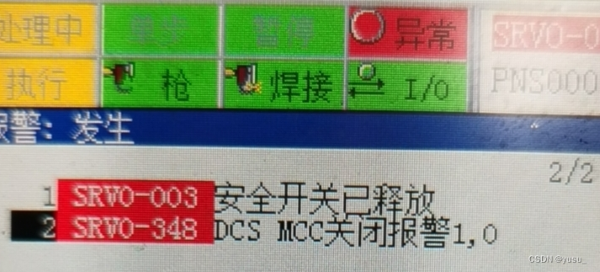
发那科机器人SRVO-348报警故障维修
常见原因及处理步骤检查急停单元确认急停单元是否发出关闭指令但接触器未关闭,需检查CRMA74信号连接是否正常。12若急停单元故障,需更换急停单元或检查其...
2025-05-12
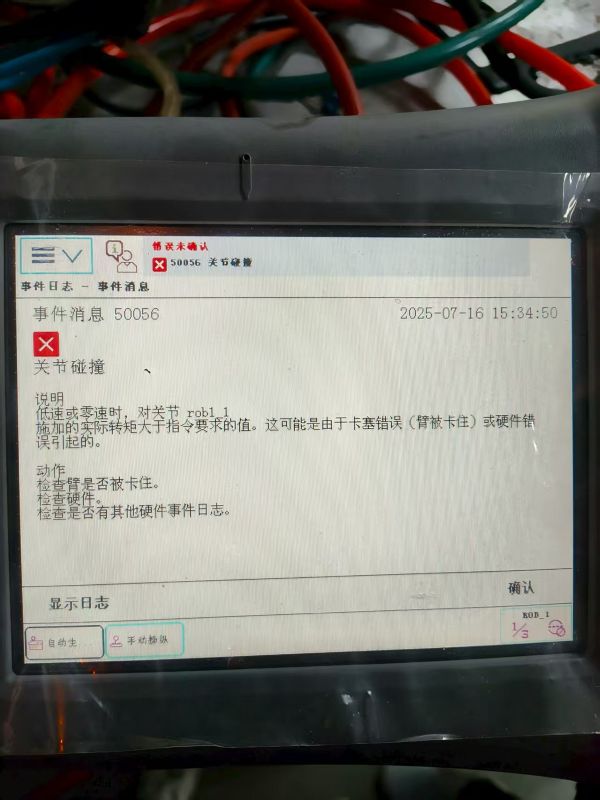
ABB机器人报警50056关节碰撞
事件日志50056的提示(低速/零速时关节`r_obj1`实际转矩异常高于指令值),请按以下步骤处理:1.立即停机保护-将机器人切换至急停状态或手动模式,避免进一步运动导致硬件损坏。2.检...

2025-05-12
发那科机器人SRVO-050报警故障维修
问题故障:机器人运行中检测出了碰撞。(伺服软件内的推定干扰扭矩超出了规定值。)存在下列可能性:1.机器人实际上发生了碰撞(已经熔敷)2.动作过猛3.外气温下降造成的摩擦增加4.输入电压下降...
2025-05-09
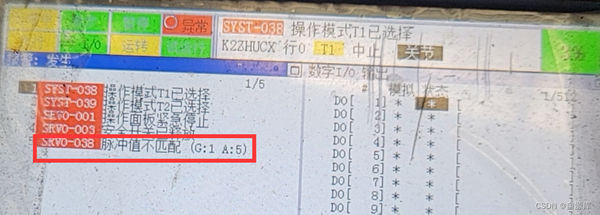
发那科机器人报警SRVO-038故障维修
问题故障:[原因]电源断开时的脉冲值和电源接通时的脉冲值不同。可能是由于如下原因所致:1.更换了脉冲编码器,或者,更换了脉冲编码器数据的后备用电池。2.加载了轴位置与当前的轴位置不同时保存...

2025-04-05
图灵机器人驱动器报警维修
客户发来的现场报警信息,要解除图灵机器人驱动器报警,需根据具体报警类型采取针对性步骤。常见报警解除方法如下:1、AL013报警解除:新伺服上电时易出现,先将盖板推上...
地址:合肥市蜀山区宿松路合肥医药健康产业园X17栋306-307
电话:15055167114
邮箱:43683002@qq.com
扫一扫 加客服
